机器人的历史
TSC机器人

在机器人学院注册的新生可以获得学术奖学金
程序. 奖学金每学期1200美元,最多两个学期. 学生
每学期必须注册至少15个学分,平均绩点必须保持在3.0
或更高版本. 累积绩点将用于继续资格.
校园联系方式:
辛迪•克莱门茨
机器人团队历史
特立尼达国家机器人队成立于2009年底,当时该学院受到邀请 加入科罗拉多太空资助联盟. 这个项目是逐渐发展起来的 每个团队都对上一年的设计进行了改进. 在春天,学生们参与其中 在大沙丘国家公园举行的COSGC机器人挑战赛中. 学生然后 向联盟提交一篇研究论文,并在COSGC会议上展示他们的研究成果 研究研讨会.
第一篇论文于2011年被接受,从那以后,该团队赢得了人民奖 选择奖5次,论文/演讲两次获得会议奖.
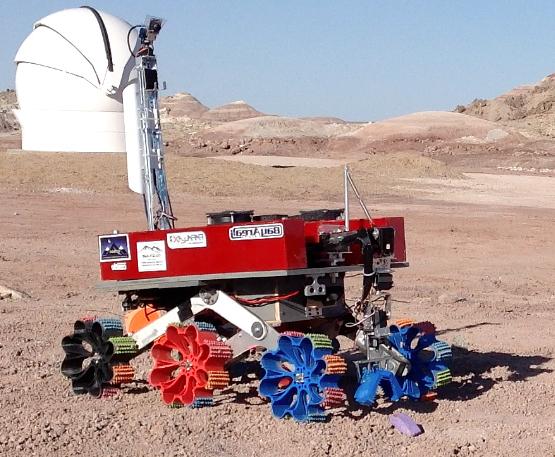
2022:群
(蝎子~黄蜂~蚂蚁~ RollyPolly ~螳螂)
- 5个机器人和3个通讯塔:
- 所有机器人上的传感器:4个超声波,2个红外线,1个倾斜,1个指南针,1个Xbee,碰撞传感器,
- 塔上的传感器:超声波,指南针,Xbee
- 6个定制印刷电路板(2种设计)
- 语言:Propeller C
- 所有车轮3D打印柔性材料
- 无人机体3D打印和丙烯酸
- 在沙丘独自完成5个课程.
- 演示自动映射障碍路线
- 1岁以下最佳机器人.5公斤(重580克至720克).
- 最佳高级自治映射




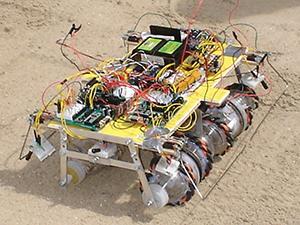
2021:培根
(信标全地形通信作战导航仪)
- 总共3个机器人:1艘母舰和2架无人机
- 母舰上的传感器:3个超声波,3个红外线,1个倾斜,1个罗盘,1个Xbee
- 每架无人机上的传感器:2个超声波传感器,1个红外线传感器,1个倾斜传感器,1个罗盘传感器,1个Xbee传感器
- 信标上的传感器:Pixy2传感器,1个Xbee
- 3定制印刷电路板
- 语言:Propeller C和Arduino C
- 全车轮3D打印
- 3D打印无人机机体
- 用亚克力剪成的母舰
完成了我们自己设计的6门课程,因为我们是自己去的沙丘.
成功从母舰上装卸无人机.
半成功映射障碍物的位置.


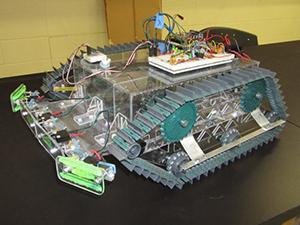
2020年:沃克
- 传感器:超声波,罗盘,倾斜,信标,红外线,1个LCD, Bump.
- 定制印刷电路板
- 语言:PropC.
- 3D打印车轮.
- 从我们自己去沙丘开始,完成了所有我们自己设计的6门课程.


2020年:晚上
(导航独立地形探索者)
- 传感器:超声波,罗盘,倾斜,信标,红外线,1个LCD, Bump.
- 定制印刷电路板
- 语言:PropC.
- 3D打印车轮.
- 从我们自己去沙丘开始,完成了所有我们自己设计的6门课程.

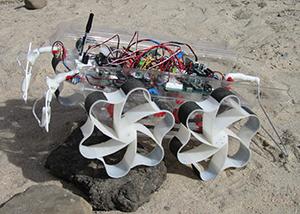
2019年:公司
(黄金漫游智能奇幻制作独立导航仪
- 传感器:超声波,罗盘,倾斜,信标,红外线,1个LCD, Bump.
- 定制印刷电路板
- 语言:PropC.
- 3D打印车轮.
- 完成全部6门课程.